阅读笔记:HSM-SMCS: Task Assignment Based on Hybrid Sensing Modes in Sparse Mobile CrowdSensing
一、基本信息
- 阅读人和日期:WJ Huang,2022.3.18
- 引用格式:Wei X, Li Z, Ren C, et al. HSM-SMCS: Task Assignment Based on Hybrid Sensing Modes in Sparse Mobile CrowdSensing[J]. IEEE Internet of Things Journal, 2022.
- 单位:Jilin University
- 原文链接:https://ieeexplore.ieee.org/abstract/document/9711556
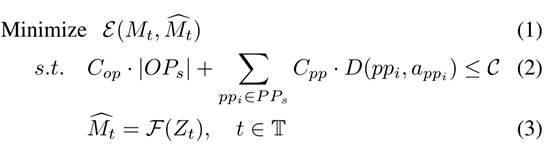
- 概述:设计了一个基于稀疏移动众感知(HSM-SMCS)混合感知模式的任务分配框架,该框架联合招募合适的机会主义和参与式参与者,以实现感知成本和数据质量之间的权衡。
二、问题定义
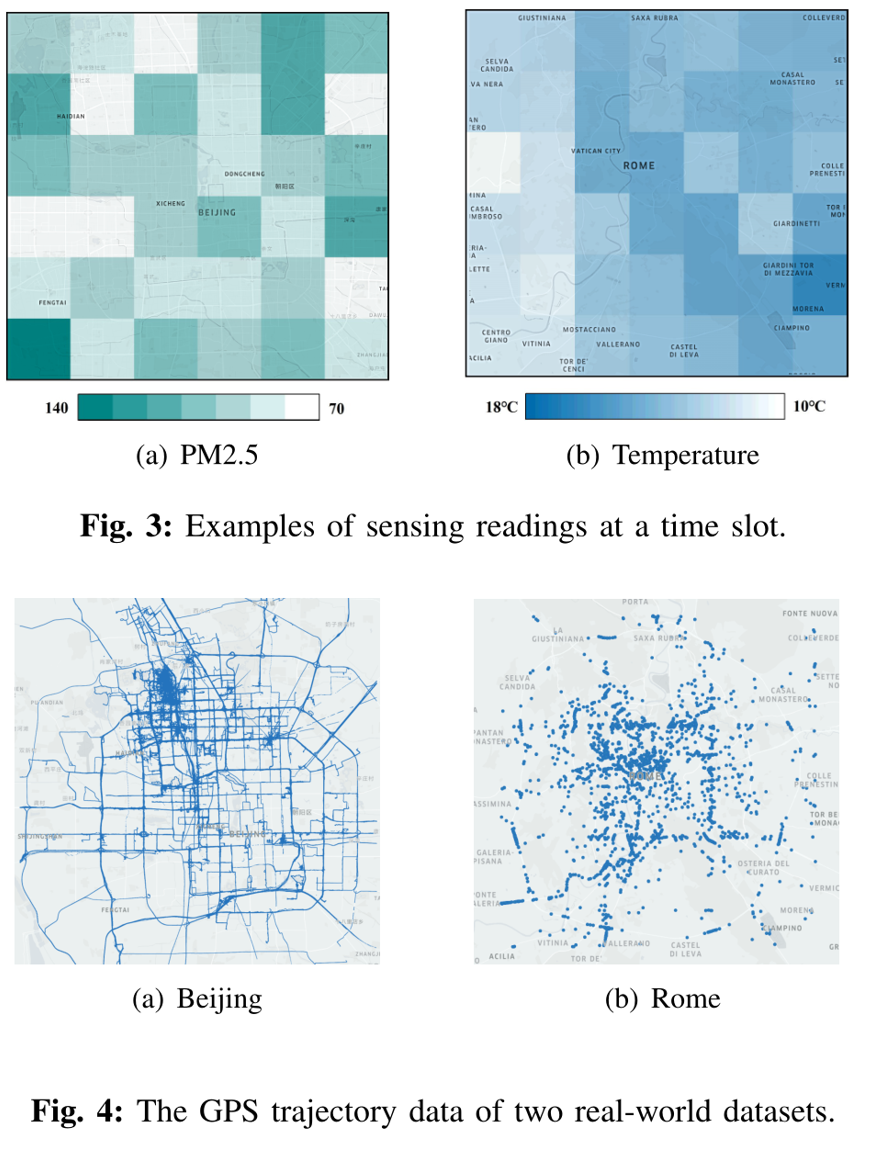
传感任务的数据质量:
Cost:
机会式(op):固定成本,参与式(pp):与移动距离成比例(假设所有参与者都是诚实的,并将实际的传感数据返回平台)
三、方法论
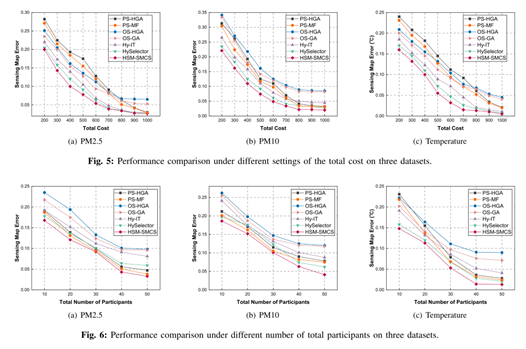
在第一阶段,平台根据机会式参与者的历史轨迹预测未来的运动
在机会主义参与者的历史轨迹数据稀缺的情况下,提出了一种基于迁移学习技术的移动预测模型。
基本思想是将适当的轨迹数据从轨迹丰富的参与者转移到新参与者的数据。通过计算位置之间的语义和时间相似度来获得的基于由新参与者的原始数据和转移数据组成的训练数据,利用半马尔可夫模型预测他们未来的轨迹。
在第二阶段,基于对感知地图推理的贡献,平台联合招募最合适的机会式和参与式参与者,在总成本约束下执行感知任务
提出了一种启发式的两阶段搜索算法来选择合适的机会式和参与式混合招募策略。
第一阶段在总成本约束下,迭代搜索并找到对感知地图推理贡献最大的机会式参与者。在论文中,op的贡献定义为其估计的覆盖单元对感测地图推断的重要性

第二阶段,为每个记录选择最合适的pp,cell对。考虑到移动距离和单元对推理的重要性,采用贪婪算法在当前记录的剩余成本约束下迭代选择对。
在第三阶段,该平台根据历史数据和时空相关性准确重建遥感地图。
使用了改进的贝叶斯压缩感知方法,该方法利用历史数据和时空相关性进一步提高重建精度
基于迁移学习的移动预测模型
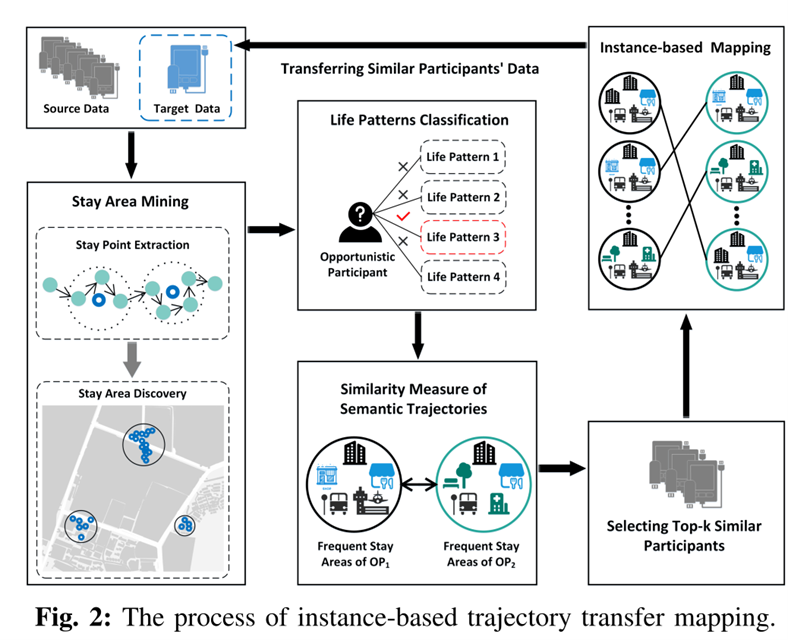
第一部分:停留区域
将地理轨迹转换为语义轨迹。由于原始GPS轨迹通常包含许多冗余点,需要找出长时间停留的位置,称为停留点。将这些密集的停留点聚集成停留区
第二部分:生活模式分类
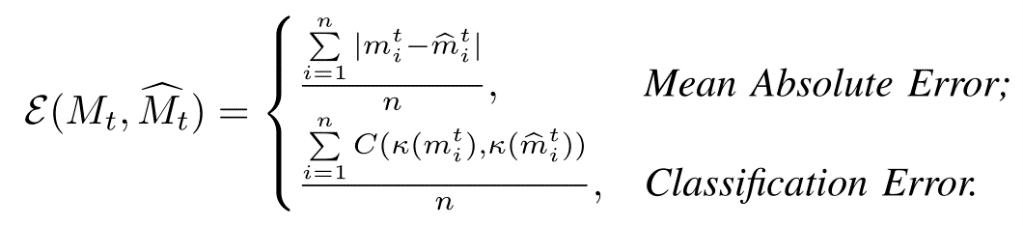
相似的参与者有相似的生活模式,尤其是在频繁停留的区域数量方面。频繁停留区域表示参与者轨迹中经常访问的区域,通常反映真实的行为活动。采用时间熵来检测停留区域是否为频繁停留区域。


第三部分:语义轨迹的相似性度量
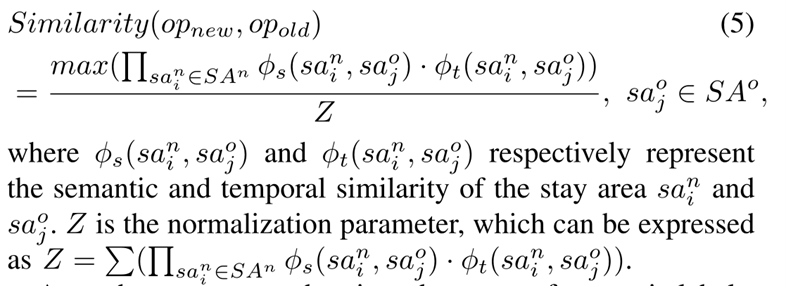
由于每个停留区域都可以被视为一组语义标签,因此利用Jaccard相似系数来度量停留区域的相似性。停留区的语义相似性定义如下

第四部分:基于实例的迁移映射和移动性预测(Instance-based Transfer Mapping and Mobility Prediction)
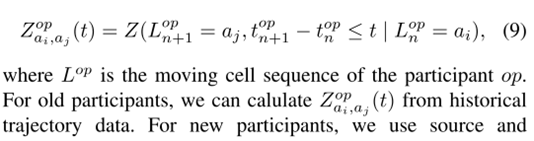
基于相似性度量,可以找到与新参与者轨迹模式最相似的top-k参与者。对于具有转移数据的新参与者和具有丰富历史数据的旧参与者,需要预测他们可能覆盖哪些cell。利用时间齐次半马尔可夫模型来预测cell之间的迁移概率。
概率为:
算法:
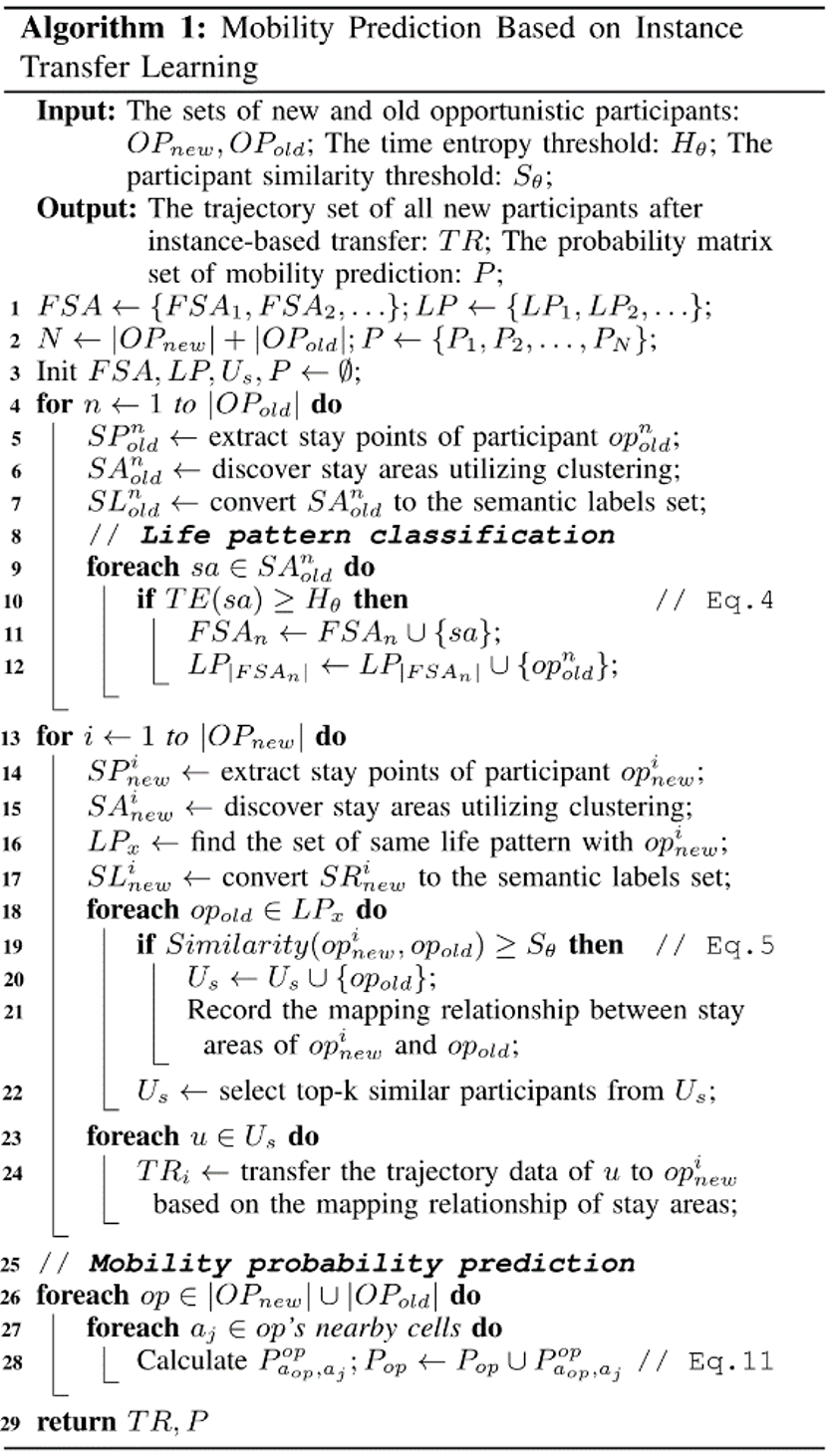
算法描述:将停留点聚类成停留区域
将具有相同数量频繁停留区域的参与者划分为一类人,算法会发现每个新参与者的停留区域。由于他们几乎没有历史数据,他们的停留区域被视为经常停留的区域。
最后,利用半马尔可夫模型预测OPnew和OPold的未来位置
基于混合感知模式的任务分配方案
采用了启发式两阶段搜索算法
倾向于选择覆盖高优先级小区,为感知地图重建提供更多贡献的机会主义参与者。
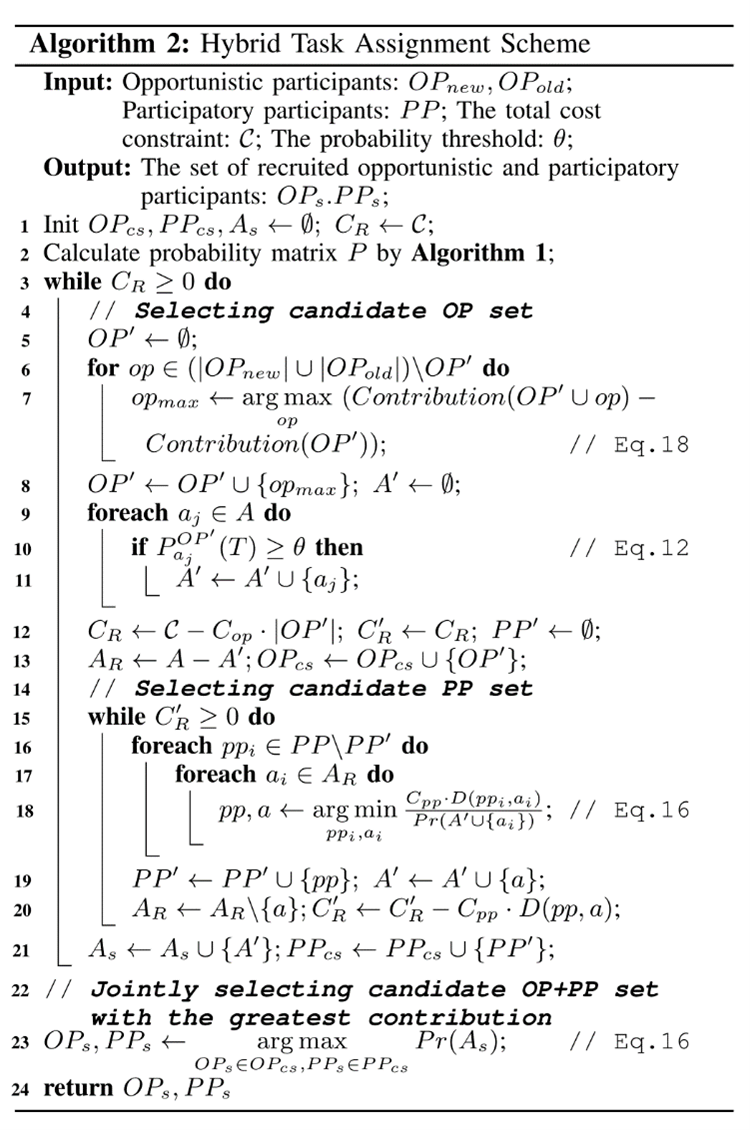
算法描述:
候选机会主义参与者的选择:
迭代选择增量贡献最大的op,直到总成本用完
候选参与式参与者的选择:
计算pp的移动成本与单元优先级的比率。在计算所有比率后,选择具有最小比率的pp,cell对,最后,算法得到OPcs+Pcs的| C/Cop |可能候选集,以及相应的候选单元集As。选择贡献最大的候选集作为最终任务分配方案。
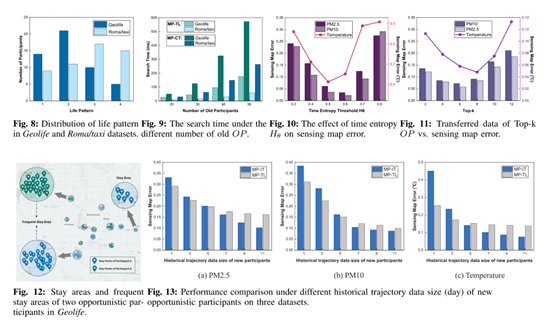
四、实验部分
实验比较