
机会式群智感知中覆盖最大化的去中心化任务分配
研究背景与问题
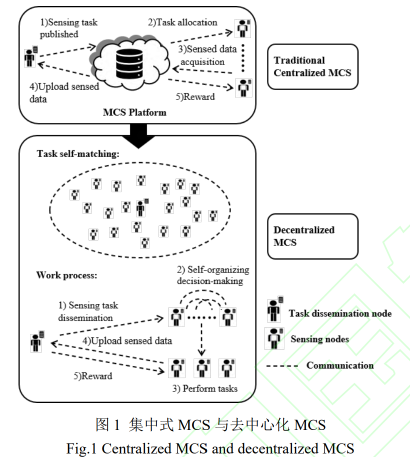
领域基础:移动群智感知 (MCS) 广泛应用于环境监测、智慧交通、城市规划等领域,任务分配是决定系统实用性的核心环节。其中机会式感知因无需改变用户日常轨迹、参与度高且成本低,成为当前研究热点。
集中式方案的核心缺陷:性能瓶颈:大规模节点和任务场景下,中心平台计算成本极高,甚至无法满足实时性要求。单点失效:云服务节点故障会直接导致感知任务中断。 动态适应性差:无法实时响应节点的加入、离开或失效,重规划r资源消耗大。 隐私风险:收集用户历史移动轨迹会暴露位置隐私,抑制用户参与意愿。
去中心化的核心挑战:在全局预算约束(参与感知的节点总数不超过 bp)下,实现任务覆盖最大化,同时避免状态空间指数爆炸或约束松弛带来的负面影响。
论文贡献
论文针对上述问题,提出了四项创新性成果:
问题转化创新:将带全局约束的集中式任务分配问题,转化为感知节点自主决策是否参与的多智能体协同系统,实现完全去中心化。
算法创新一:提出去中心化蚁群算法 (DCACO),利用蚁群算法的分布式计算特性,通过节点间通信共享最优解和更新信息素,适配去中心化场景。
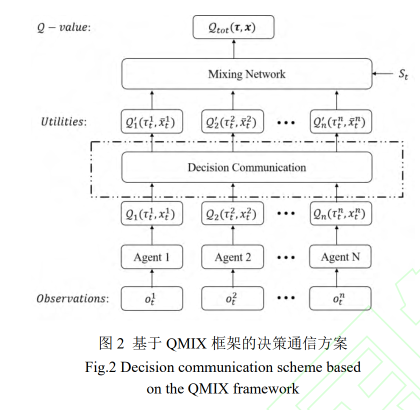
算法创新二:设计基于QMIX框架的决策通信方法 (QMIX-DCOM),在 "集中式训练、分布式执行" 基础上引入决策通信层,严格满足全局预算约束。
实验验证:在真实数据集上证明,两种方法的任务覆盖率接近集中式离线规划算法,且在耗时、综合性能上优于基线去中心化算法。
核心技术方法
去中心化蚁群算法(DCACO)
一. 问题映射:将感知节点集合作为蚂蚁可到达的 "城市",蚂蚁探索的路径对应候选任务分配方案,限制蚂蚁路径长度为全局预算bp,天然满足约束条件。
二. 预沟通机制:仅轨迹与任务集有交集的节点创建蚂蚁进行探索,节点广播自身可覆盖的任务信息,用于后续计算路径的任务覆盖度。
三. 算法核心流程:1. 初始化:构建全连接有向图,初始化信息素矩阵、本地最优解与最优值。2. 路径探索:蚂蚁根据信息素浓度通过轮盘赌选择节点,生成长度为bp的路径。3. 质量评估:计算路径对应的任务覆盖度,与本地及其他节点广播的最优解对比。4. 信息素更新:加强最优解路径的信息素,挥发其他路径的信息素。5. 终止决策:连续Tc 次最优值不变时停止,节点根据最优路径判断自身是否参与。
四. 关键参数:信息素挥发因子ρ=0.2,停止标志Tc=20。(综合覆盖率、耗时、通信开销后最优)
QMIX-DCOM 方法
一. QMIX基础建模:
局部观测:节点自身轨迹对各感知任务的覆盖情况。
全局状态:所有节点的局部观测集合。
动作空间:参与感知 (1) 或不参与感知 (0)。
奖励函数:结合任务覆盖率与预算约束惩罚,超预算时惩罚力度更大。
二. 决策通信层创新:
1. 每个智能体网络输出建议动作与个体Q值
2. 节点间通信交换上述信息,对建议参与的节点按Q值从高到低排序,选出前bp个节点
3. 若建议参与的节点数量不足bp,从建议不参与的节点中选Q值最小的补足
4. 所有节点根据最终筛选结果修改动作,严格满足全局预算约束。
实验设计与结果
一. 实验设置
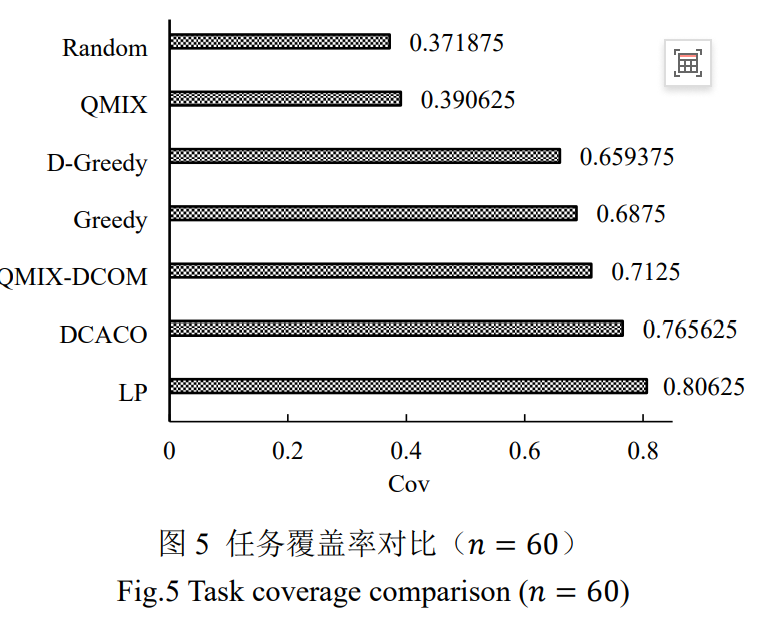
本文实验采用Geolife 轨迹数据集,筛选出60位北京市用户的有效GPS轨迹,以北京市34个空气质量监测站点作为感知任务点,选取任务覆盖率、算法耗时、信息交换量作为核心评估指标,并通过Z-Score 标准化结合权重计算综合性能指标。实验将提出的DCACO和QMIX-DCOM算法与LP、Greedy、Random、QMIX、D-Greedy五种基线算法对比,分别在感知节点数为20和60 的不同规模场景下,设置对应的任务数量、全局预算约束与覆盖度约束,所有测试结果均取 20 组随机生成任务的平均值。
二. 核心实验结果
感知节点数n=60,任务数h=8,预算bp=8,覆盖度kp=2下的各算法的表现结果:
成果列表
- 【论文】陈杨辉,於志勇,黄昉菀,郝勇涛,涂淳钰,吴越钟. 机会式群智感知中覆盖最大化的去中心化任务分配[J/OL],小型微型计算机系统,2024.
- 【专利】於志勇,涂淳钰,陈杨辉,黄昉菀,吴越钟. “基于遗传算法的机会式感知满足全局约束的去中心化任务分配方法” ,中国专利,2025年申请, 202510124683.X.